线性二次调节器LQR
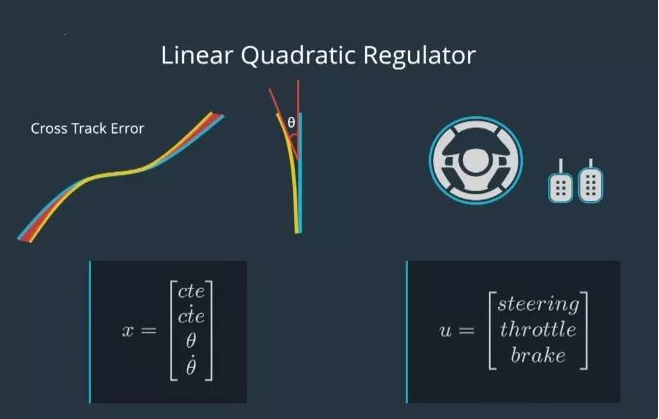
线性二次调节器(Linear Quadratic Regulator 或LQR)是基于模型的控制器,它通过控制车辆状态来使小车运动的横向误差和朝向误差最小化。Apollo使用LQR进行横向控制。横向控制包含四个参数:横向误差 $cte$、横向误差变化率 $\dot{cte}$、朝向误差 $\theta$和朝向误差变化率 $\dot{\theta}$,这四个参数构成1×4的列向量$x$。变化率与导数相同,用变量名上面的一个点来代表。该车有三个控制输入:转向、加速和制动,这个三个控制输入集合称为$u$。
$x$和$u$与自身相乘,这样负值也会产生正平方,为每个二次项分配权重,并将它们加在一起。
最优的$u$应该最小化二次项的和随时间的积分。
$Q$和$R$代表$x$和$u$的权重集合。$x^T$和$u^T$是转置矩阵,这意味着它们几乎与$x$和$u$相同,只是重新排列以便矩阵相乘。$x$乘以$x^T$,$u$乘以$u^T$,实质上是将每个矩阵乘以它自己。
$Q$在Apollo代码中对应modules/control/conf/scout_conf.pb.txt文件下的下面配置参数1
2
3
4matrix_q: 0.001
matrix_q: 0.0
matrix_q: 0.01
matrix_q: 0.0
$R$则对应1
r: 0.00001
循迹过程中可以修改以上参数以使得小车更加稳定地进行循迹。
在LQR中,控制方法被描述为$u=-Kx$。其中,$K$代表一个复杂的skeme,代表如何从$x$计算出$u$。所以找到一个最优的u就是找到一个最优的$K$。
循迹操作流程
- 将操作者电脑连接至开发套件(小车)的无线网络中(小车自带一个路由)
- 操作电脑使用ssh远程登录至小车,若是直接在小车的系统上进行操作可以免去步骤1和2.
进入到apollo代码的根目录下,启用docker环境, 并进入docker环境
1
2bash docker/scripts/dev_start.sh
bash docker/scripts/dev_into.sh启动DreamView,执行bootstrap.sh脚本
1
bash scripts/bootstrap.sh
在浏览器中打开DreamView,输入小车的IP地址:8888即可(若是在小车系统上,直接用localhost:8888即可访问)。
- 在
Module Controller下打开CAN Bus、Localization、GPS.注意:
- 为保证可以接受到GPS信号,尽量在开阔处进行测试。
- 若有修改参数,无需重新编译代码,直接将对应的模块重新打开一下即可。
- 注意观察
Task菜单下的Module Delay,若出现红色的延时,重新打开一下对应的模块。
- 将小车停至合适的位置(想要循迹的初始位置),操作者将
Module Controller下的data recorder(录制运行时的数据)和RTK recorder(录制轨迹)打开后,就可以开始使用遥控器操控小车行驶来录制轨迹数据了。 - 录制完毕后,将
data recorder、RTK recorder模块关闭,将小车停至循迹的初始点,打开Module Controller下的RTK replay、control,用遥控器将小车切入自动驾驶模式。然后在DreamView下的Task菜单下点击Start Auto,小车便可以开始自动循迹。注意:循迹期间需密切关注小车的行驶情况,遇险时应立即使用遥控接管或拍下小车后面的急停按钮。