简介
此系列博客将记录如何使用百度Apollo自动驾驶开发者套件完成循迹功能。循迹指的是让车辆/机器人自己照着原来设定的路线行驶,因此首先要进行录制路线Record,然后再进行循迹Replay,以及完成简单的避障功能。
Apollo的开发者套件,也就是一辆小车,如下图所示, 拥有一个激光雷达,两个GPS天线,一个IMU,一个毫米波雷达,3个摄像头用于感知环境,小车同时配备一个遥控器用于控制小车,小车有两种模式:遥控模式和自动驾驶模式。

工控机软件系统安装
Ubantu系统安装
由于Apollo平台的代码均基于Linux,因此需要安装一个Linux系统,此处推荐Ubantu,官方用的也是Ubantu系统,官方教程推荐的是Ubantu14.04.3系统,但此系统较老旧,可能出现一些奇怪的问题(比如无法上网),因此还是推荐使用Ubantu16.04. 下面部分是Ubantu双系统的安装,使用虚拟机的话需要保证配置,不然跑不起来代码,至少需要给Ubantu系统分配70G的存储空间,据说两核至少需要8小时才可以编译Apollo平台。
软件准备
- Ubantu16.04
- 引导盘制作软件链接: https://pan.baidu.com/s/12KEntHWK8RZ1wSnVE6Aatw 提取码: 7vvb
步骤
- 引导盘制作
可以参考教程. 磁盘分区
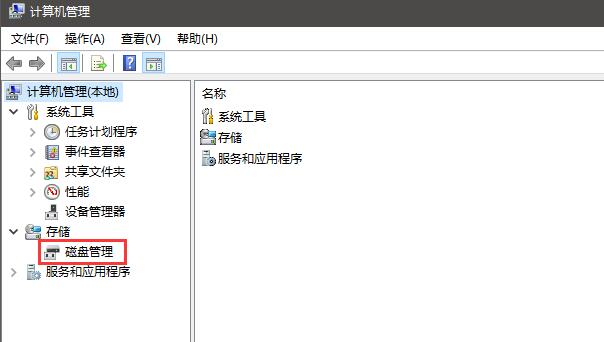
- 在“我的电脑”上右键单击,点“管理”。
进入下面界面后,点“存储->磁盘管理”。
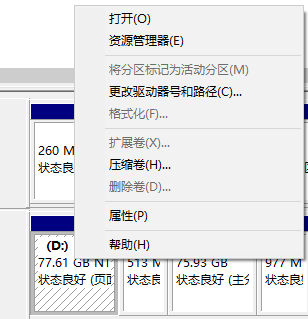
选择一个空间足够(>=70G,最好100G)的非系统盘,右键单击,选择压缩卷。
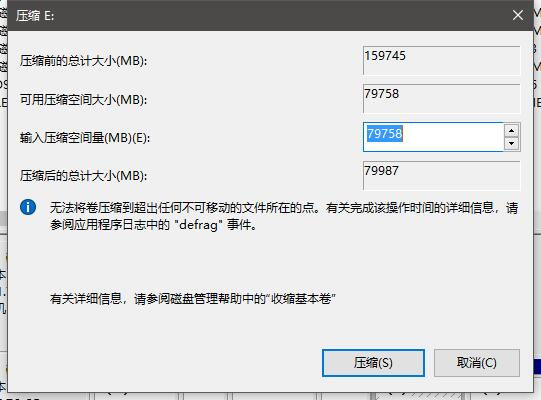
在查询完可用压缩空间后,会弹出下列对话框,输入想要压缩的空间,然后点击确认即分区完成(压缩的空间也就是预留给Ubantu的存储空间)
Ubantu安装
- 将启动盘插入电脑
- 重启电脑,并尝试进入BIOS系统,进入方式不同电脑不一样,通常进入方式为F12/F2/DEL/Enter这几个键,可以多重启几次几个键都试试。重启后疯狂敲这些键就好啦。
- 进入后,选择USB启动,然后选择Ubantu即可进入Ubantu系统的安装向导。
然后照着向导依次选择语言、时区等等就OK啦。
注意:Ubantu安装时,会要求填用户名和密码,这个密码一定要牢记,后面获取root权限需要该密码。
Docker安装
只需在Ubantu里运行Apollo提供的脚本即可,脚本链接1
bash ./install_docker.sh
Apollo源代码编译
首先获取Apollo源代码,约1G左右,下载时间较长,耐心等待。
1 | git clone https://github.com/ApolloAuto/apollo.git |
下载完后,cd进入代码的根目录下,依次执行以下脚本,执行时间较长。
1 | bash docker/scripts/dev_start.sh |
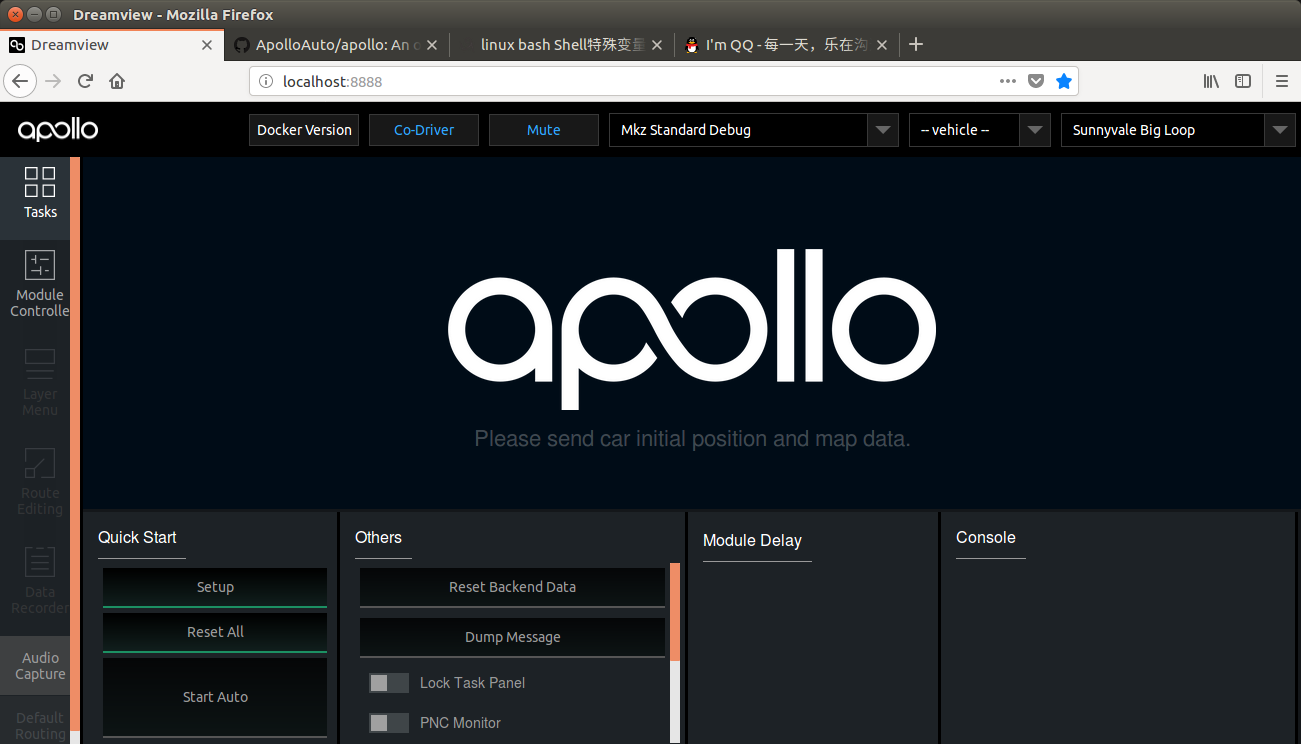
编译完成后,执行下面命令打开DreamView交互平台。
1 | bash scripts/bootstrap.sh |
启动成功的提示信息:
1 | Start roscore... |
在浏览器上访问http://localhost:8888,即可打开DreamView。DreamView界面如下所示:
到此环境就配置完毕, 下一个教程介绍如何使用DreamView完成循迹
参考
Apollo开源代码git仓库的官方教程。